0731-85311818
中文
|
English
参考MIT开源猎豹机械狗架构设计,面向机器人、机械狗、机械臂等场景设计
采用了诸如模型预测控制(MPC)等先进的控制策略,以实现对机器人运动的精确控制和优化
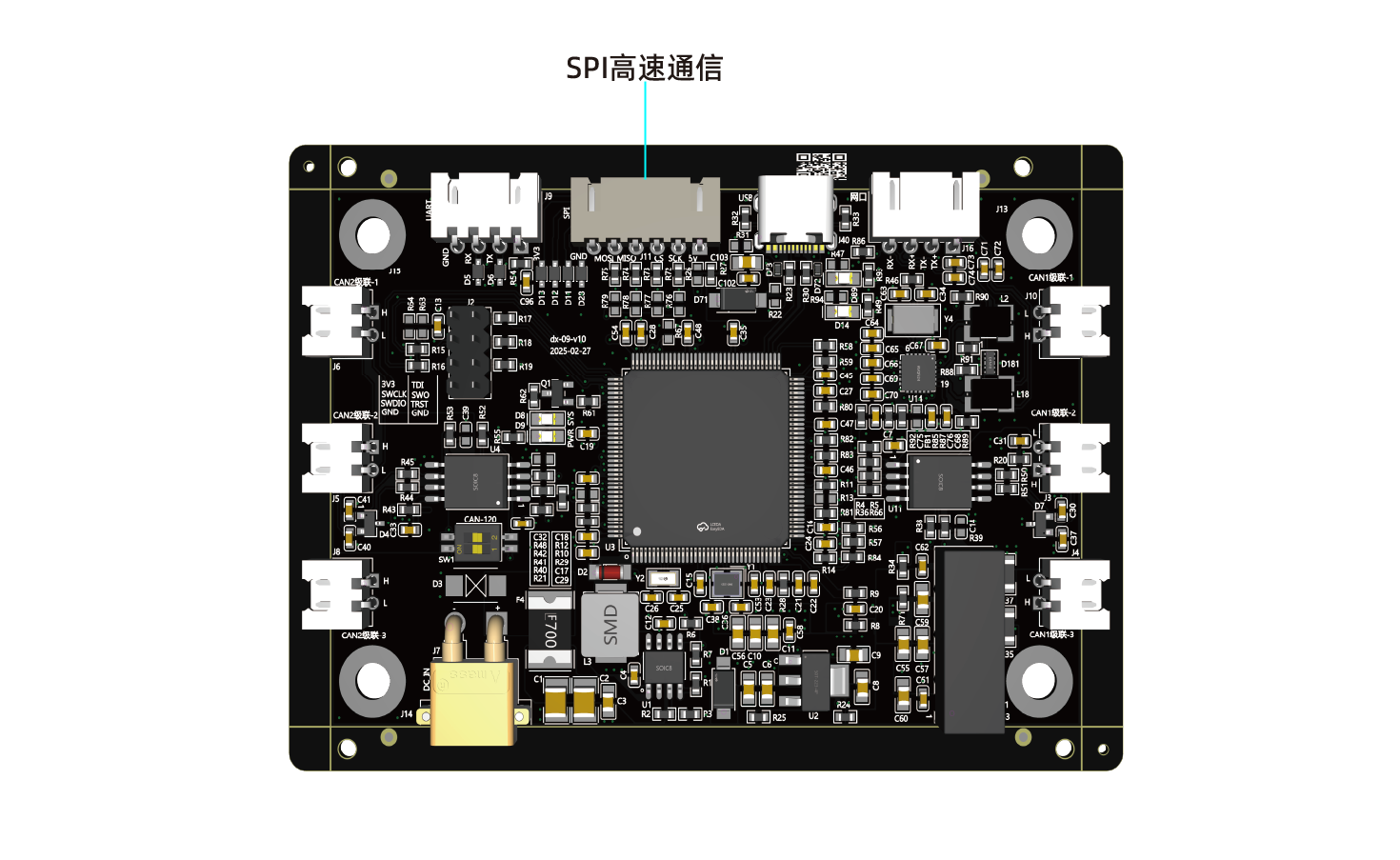
SPI全双工同步通信,数据可以同时双向传输,就像双向车道一样互不干扰。支持通过ETH接口与上位高速通, 原理图开源支持嵌入式个性化开发
| 基本参数 | |||
|---|---|---|---|
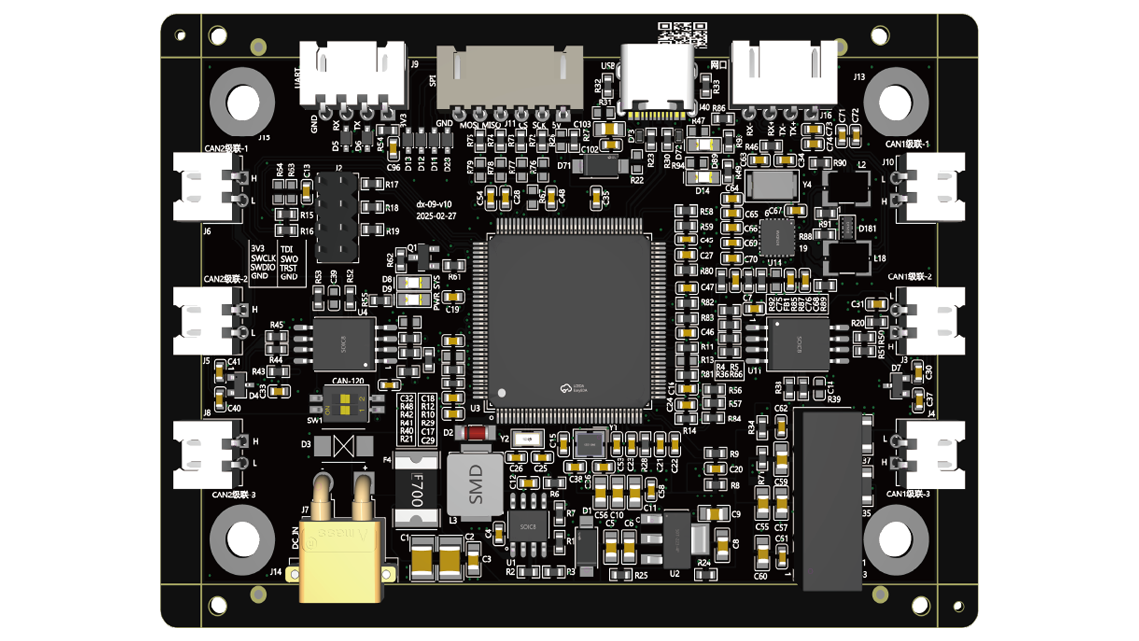
| 产品名称 | CX-05 CAN融合高速通信网关 | 产品尺寸(WxH) | 100mmx70mm |
| 工作温度 | -10-60℃ | 工作湿度 | 90%RH(无结露) |
| 工作电压 | 12-60V | ||
| 处理器参数 | |||
| CPU | colspan="3">STM32F407VET6(32-bit Arm® Cortex®-M4 168MHz MCUs, 512KB Flash,192KB SRAM,12 bit ADC,12 bit DAC,2.0 V-3.6 V, 112个GPIO) |
||
| 电源接口 | |||
| DC IN | 1xDC IN(12-60V) | ||
| 扩展接口 | |||
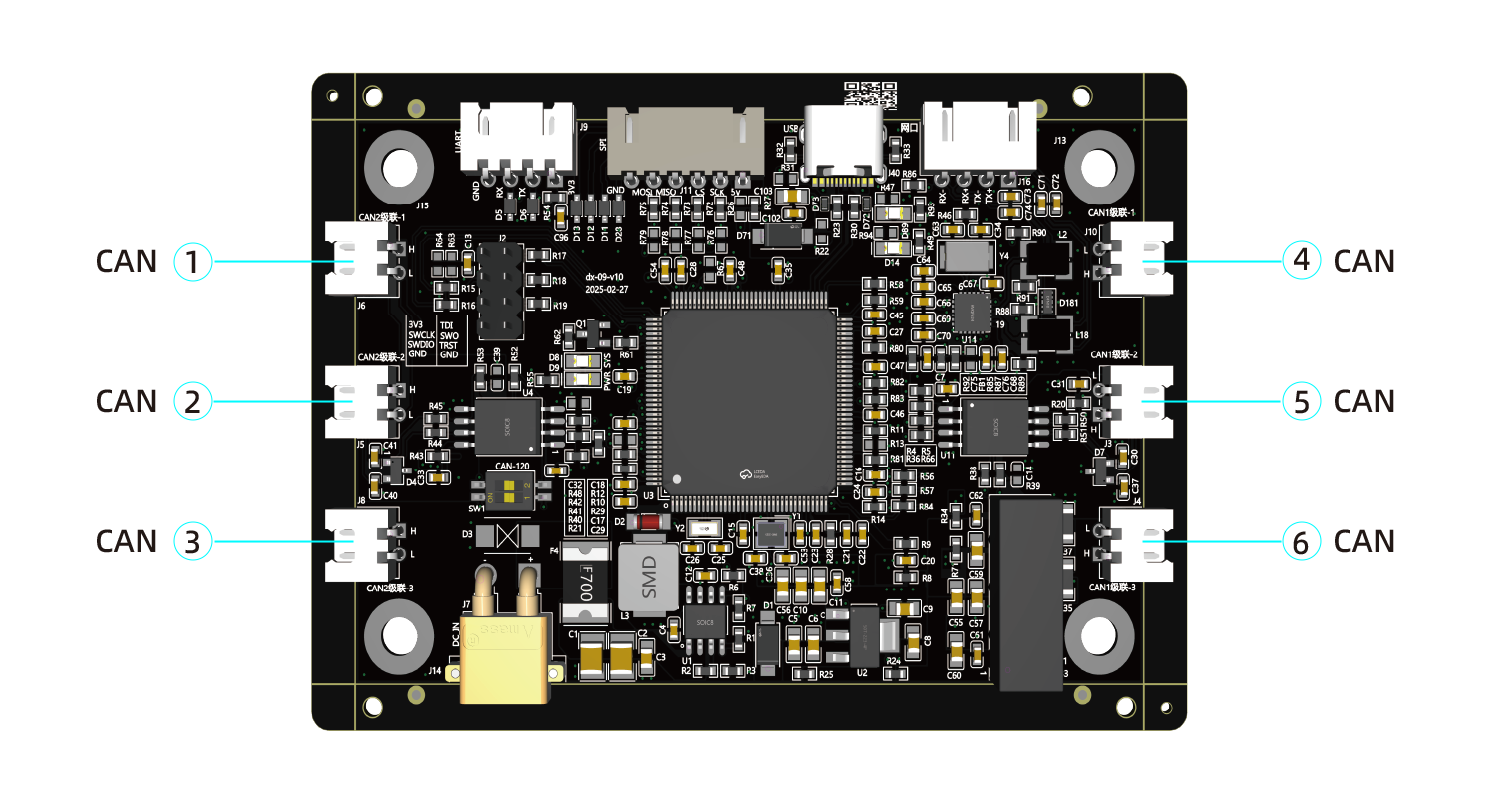
| CAN | 6×CAN | UART | 1xUART |
| USB | 1×USB | ETH | 1xETH |
![]()
![]()
![]()
![]()
![]()
![]() 0731-85311818
0731-85311818
![]() 0731-85311818
0731-85311818
![]() bot@botxfoundry.com
bot@botxfoundry.com
![]() 410000
410000
![]() 湖南省长沙市雨花区国际创新城9栋504
湖南省长沙市雨花区国际创新城9栋504
湖南灵牛机器人科技有限公司 版权所有