0731-85311818
中文
|
English
BX-12X 3D驱动机器人线控底盘,采用创新型5轮3驱1转向架构,可跨场景、跨室内外、跨多楼层作业

3D(驱动)+1X(转向)动力系统配备,动力更强劲、转向更精准、作业更从容,相比四轮八驱结构总体拥有成本更低
相比差速底盘动力更强劲转向更精准

构建四维感知矩阵,基于激光、视觉、IMU、轮式里程计等多传感融合可实现SLAM建图及高精定位导航应用,可跨场景、跨室内外、跨多楼层作业
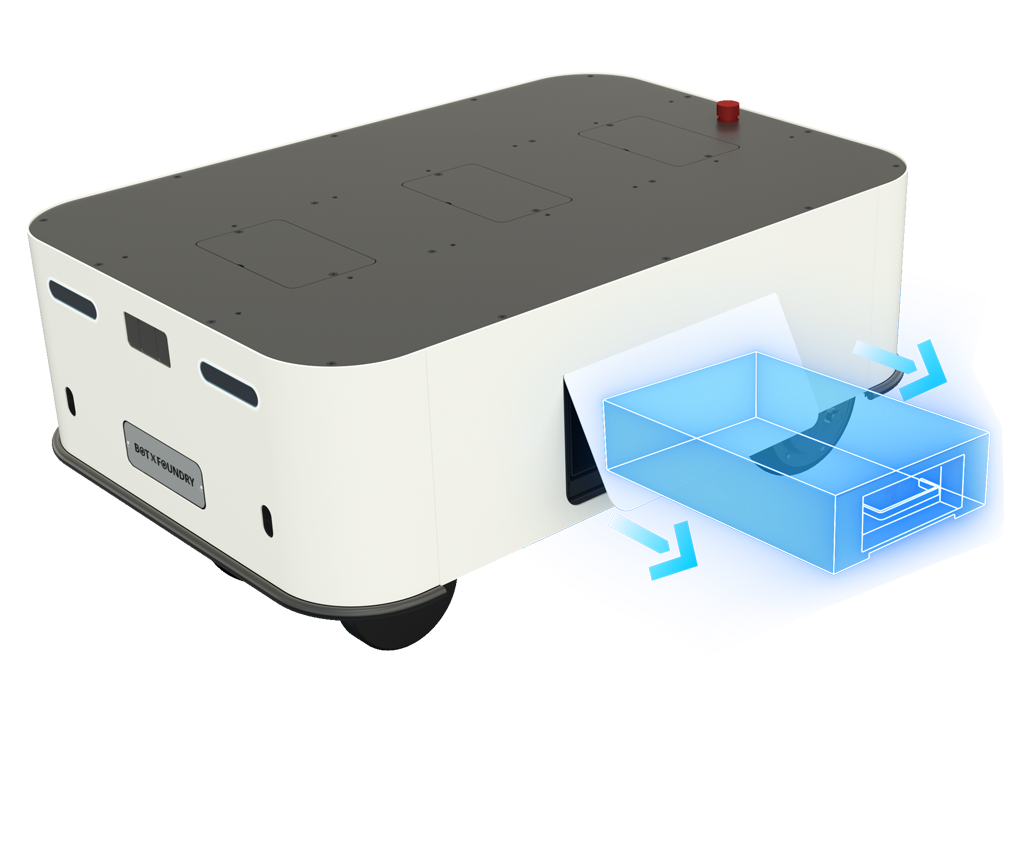
用户只需通过轻轻一拉,即可将旧电池从设备中取出,再将新电池推入即可。这种设计不仅简化了电池更换的步骤,还大大提高了更换电池的速度
内嵌多个高性能车规级IMU,包含2个加速度计、3个陀螺仪、2个气压计、1个磁力计、1个温度计
容错能力显著提升,与传统消费级传感器相比,陀螺仪的分辨率提高8倍,加速度计的分辨率提高4倍
可为智能机器人定位导航、灵活避障、运动控制提供超融合的感知能力
内嵌飞控级实时操作系统,响应实时,控制实时,驭势于心。支持多任务并发执行,且任务完全可抢占,具备强大的实时处理能力和任务管理功能
系统架构采用模块化设计,支持POSIX标准化接口协议,支持应用国际化开源社区资源,以便快速进行二次开发

搭载高性能机器人智能控制仪,构建一体化智能控制平台智慧中枢,有力提升机器人在复杂环境下的感知、认知、决策、预测能力,实现高水平的机器人具身智能。基于云边端协同架构,通过可信的无线通信网络可实现多领域协同控制及分布式集群作业

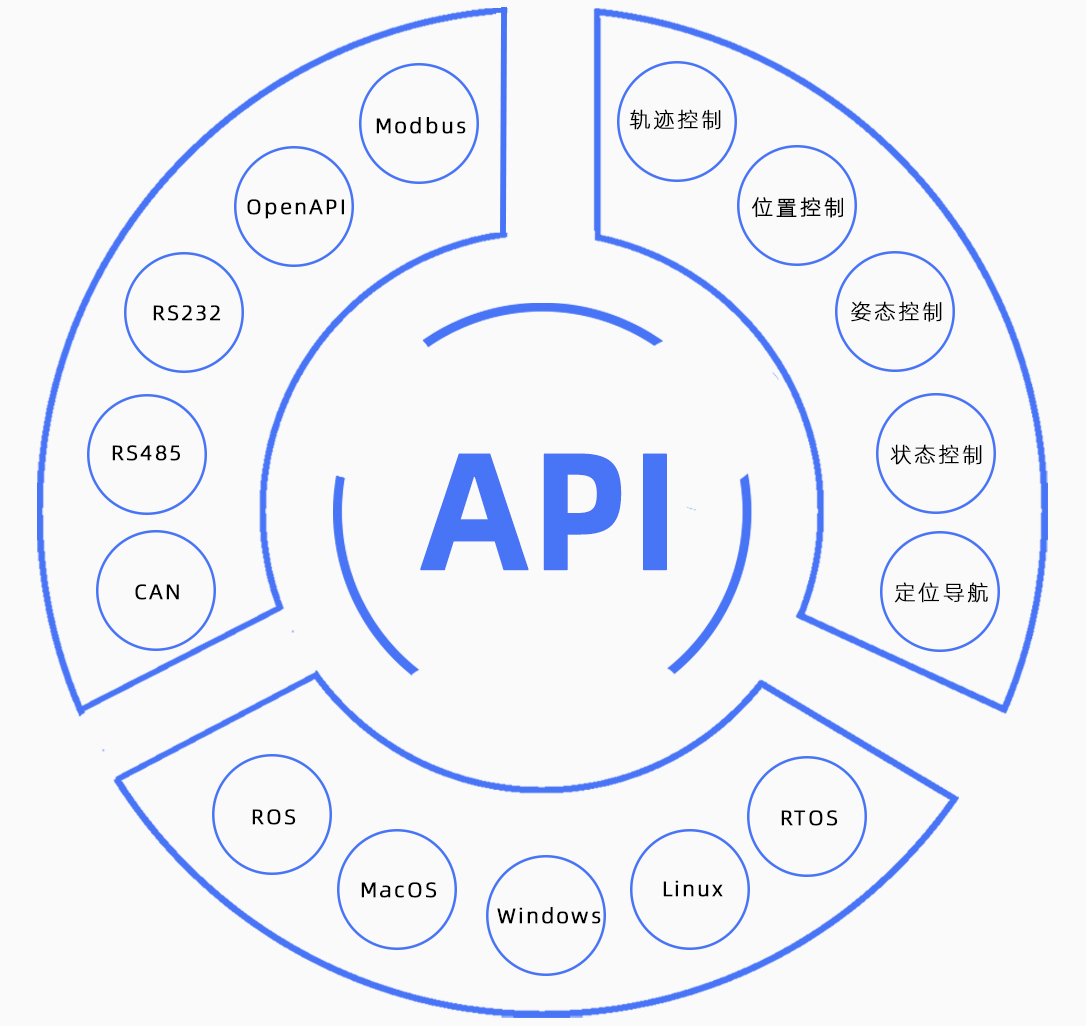
机身预留1个HDMI、1个TYPE-C、2个OTA、1个CAN、1个EMO、2个CAT6及4个电源接口,设备接口高度一体化集成,全面提升平台电气通信能力的可扩展性

支持车规级CAN总线通讯协议,支持ROS环境开发,可快速实现平台的二次开发,提升平台的复用性
配置48V 30Ah高密度电池,续航持久,低电量自主回充,内置电池防过充保护及低温环境充电自加热功能,为机器人运行提供强劲安全的动力支持
多层次机器人运行安全防护系统,基于超声波雷达、高灵敏度IMU、碰撞检测传感器、气压计等融合感知能力,配套电子围栏及急停按钮等,为机器人安全稳定运行提供智能化、多层次的安全防护体系

| 基本参数 | |||
|---|---|---|---|
| 产品名称 | BX-12X 四轮八驱全转向机器人线控底盘 | 产品尺寸(WxDxH) | 800x540x340mm |
| 底盘重量 | 80kg | 工作温度 | -20-40℃ |
| 结构形式 | 3D驱动 | 工作湿度 | 20%-80% |
| 离地间隙 | 118mm | 防护等级 | IP42 |
| 最大负重 | 150kg | ||
| 电机及运动能力 | |||
| 前轮 | 5寸万向轮X2/6.5轮毂电机X1 | 后轮 | 6.5寸轮毂电机×2 |
| 最大越障高度 | 50mm | 最大爬坡角度 | 20°(无负载)/15°(有负载) |
| 最大运行速度 | 1.5m/s | ||
| 传感器参数 | |||
| 防跌落传感器 | 4个 | 物理防撞传感器 | 数量:2个 |
| 固态激光雷达 | 1个 | 深度摄像头 | 数量:3个 |
| 超声波雷达 | 2个 | ||
| 电源及续航能力 | |||
| 电池 | 48V 30Ah | 待机运行时间 | 72h |
| 充电时间 | 4-5h | 空载运行时间 | 12h |
| 自主回充 | 支持 | 手动充电 | 支持 |
| 智能驾驶仪 | |||
| 主处理器 | STM32H753IIK6(32-bit Arm® Cortex®-M7 480MHz MCUs, 2MB Flash,1MB RAM,16 bit ADC, 12 bit DAC,1.62V-6V, 140个GPIO) |
协处理器 | STM32F103C8T6(32-bit Arm® Cortex®-M3 72MHz MCUs, 64KB Flash,20KB SRAM,2V-3.6V,12 bit ADC,37个GPIO) |
| 磁力计 | 1个(博世芯片) | 气压计 | 2个 (博世芯片) |
| 加速计 | 2个(博世芯片) | 温度计 | 1个 |
| 陀螺仪 | 3个(博世芯片) | ||
| 扩展接口 | |||
| 1xHDMI | 1xHDMI | DB9 Female | 1xCAN 1XOTA(升级)1XEMO(急停) |
| CAT6 | 2xCAT6(1000Mbps) | TYPE-C | 1xType-c 1XOTA |
| DC OUT | 1x5V 5A 1x12V 10A 1x24V 30A 1x48V 30A |
||
![]()
![]()
![]()
![]()
![]()
![]() 0731-85311818
0731-85311818
![]() 0731-85311818
0731-85311818
![]() bot@botxfoundry.com
bot@botxfoundry.com
![]() 410000
410000
![]() 湖南省长沙市雨花区国际创新城9栋504
湖南省长沙市雨花区国际创新城9栋504
湖南灵牛机器人科技有限公司 版权所有