0731-85311818
中文
|
English
0731-85311818
Embedded high-performance DSP chip, high-precision current and voltage acquisition, adaptable to multiple types of motors, open technology architecture

Embedded TI The TMS320F28335 high-performance DSP chip is equipped with a 32-bit C28x+FPU core, providing high-speed parallel operation capability and mature and stable real-time control capability for servo drivers. The high-speed processing capability reaches 150MHz, including 16 independent ADC channels, 6 DMA channels, and 6 TI specific enhanced pulse width modulation modules. It has the characteristics of high accuracy, low power consumption, high peripheral integration, large data and program storage capacity, and precise and fast A/D conversion
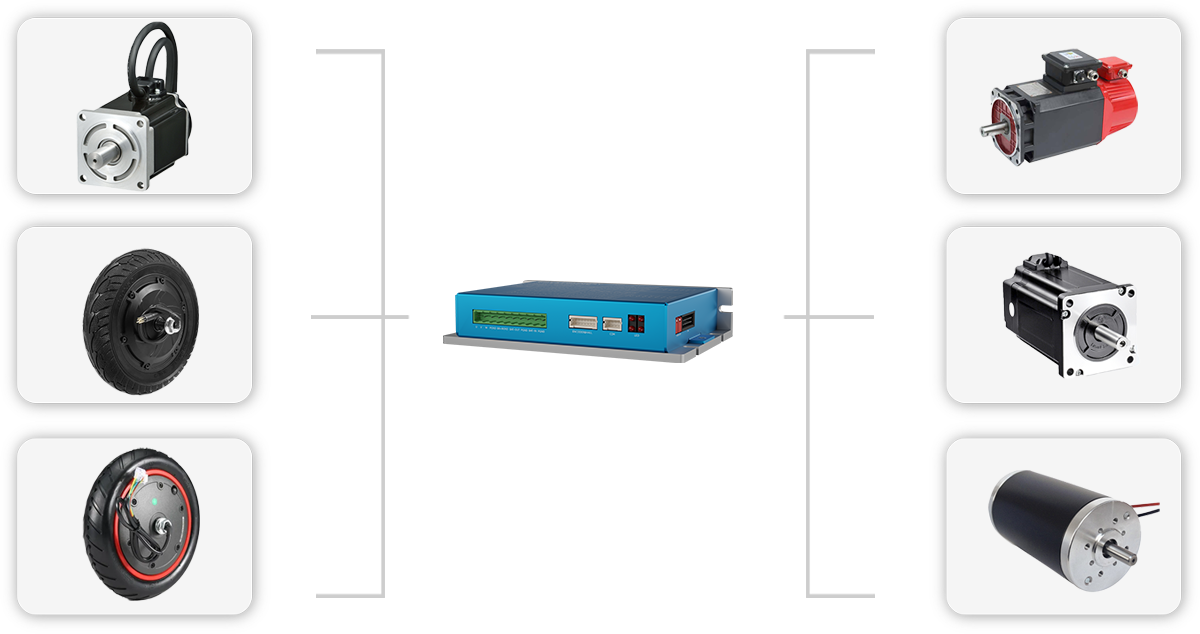
Can be adapted to various motor models such as Robot active wheel, servo motor, stepper motor, etc., comprehensively improving product compatibility and meeting the needs of different application scenarios
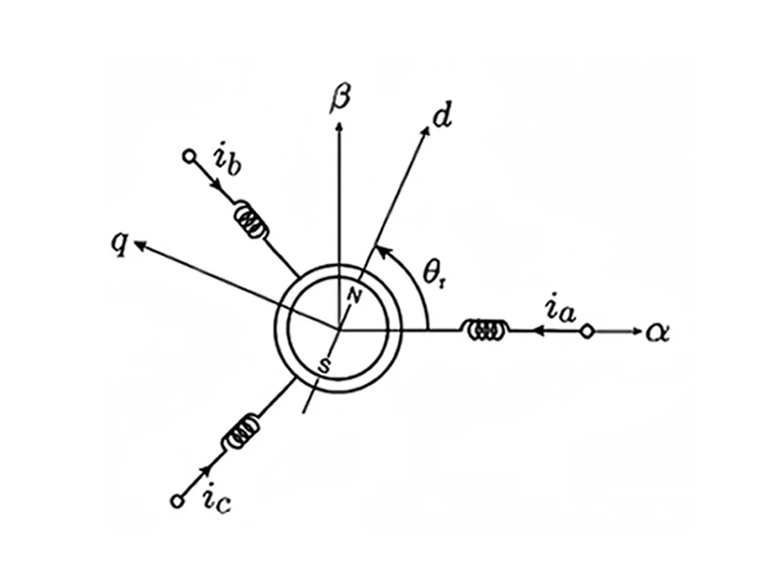
Support vector control algorithms such as FOC and SVPWM to comprehensively improve the dynamic performance of the motor, ensuring efficient and high-precision operation of the motor under various working conditions Supports classic control modes such as torque, speed, and position, adapting to the needs of different scenarios and control accuracy applications Support the selection of different control models such as open-loop control and closed-loop control, inductive control and non inductive control, and can achieve seamless switching of models
Support high-precision sensing control based on incremental encoders, absolute value encoders, Hall sensors, digital temperature sensors, etc., to achieve sensitive sensing of motor torque, speed, position, etc. Support high-precision acquisition of two-phase current and three-phase voltage based on ADC, real-time quantification of current and voltage dynamic data, ensuring real-time dynamic response, providing real-time and accurate control information, more precise control, and more real-time response

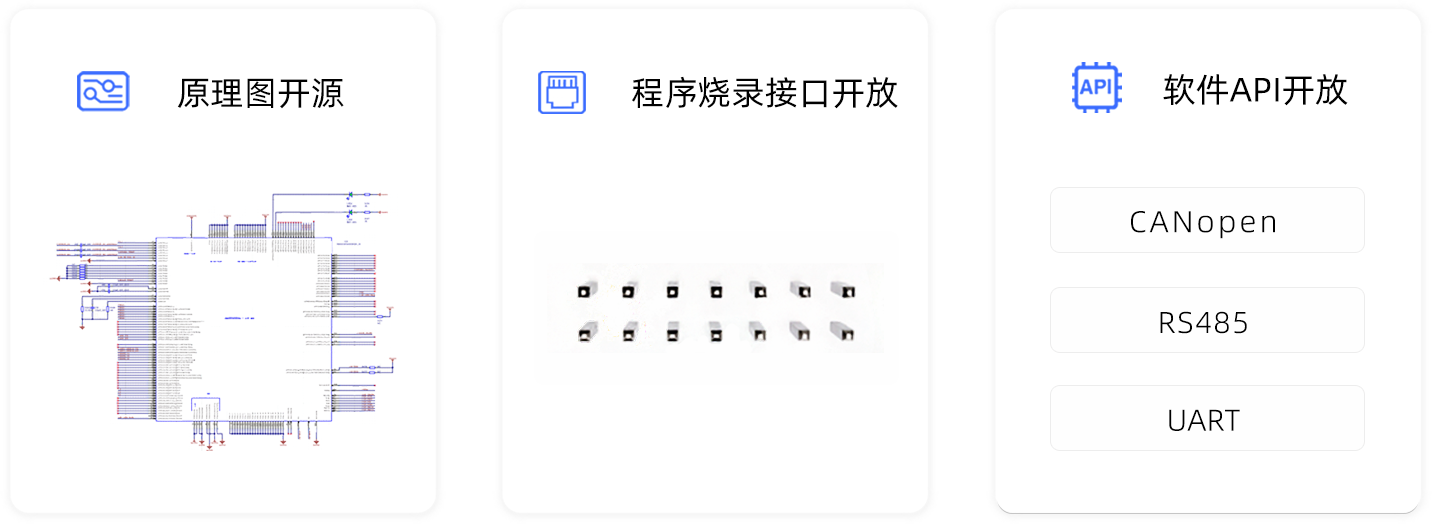
Based on TI's mature technology platform, it supports open source of driver schematics, program burning interfaces, and communication control hardware interfaces. Based on standard communication protocols such as CAN and RS485, the open and shared software and hardware architecture makes the development and adaptation of solutions more autonomous and controllable, with lower development and adaptation costs and more relaxed control over the situation
Provide multiple safety protections such as anti reverse connection, input undervoltage and overvoltage, output short circuit and overcurrent, overload, temperature monitoring, safety isolation, LED warning lights, etc., to provide an intelligent and multi-level safety protection system for the safe and stable operation of power supply

| Basic Parameters | ||||
|---|---|---|---|---|
| Product Name | DX-05 High precision servo drive | Product Dimensions(WxDxH) | 160x108x33mm | |
| Working environment temperature | -10-50℃ | Maximum environmental humidity | 90% Rh (no condensation) | |
| Storage temperature | -10-70℃ | Usage occasions | Avoid dust, oil mist, and corrosive gases | |
| axle count | ||||
| Number of axes | single-axis | |||
| Suitable motor type | ||||
| Adapted motor | Robot active wheel, servo motor, stepper motor | |||
| Electrical Characteristics | ||||
| Working Voltage | 20-48V DC | rated current | 15A | |
| Peak current | 30A | |||
| Main circuit control mode | ||||
| Main circuit control mode | SVPWM control | |||
| Control mode | ||||
| Bus control | CAN bus mode | |||
| Position control |
Instruction smoothing method: low-pass smoothing filtering; Smooth filtering of S-curve; Dynamic mean filtering Torque limit: Parameter setting method Feedforward compensation: parameter setting method |
|||
| Speed control | Instruction smoothing method: low-pass smoothing filtering; Smooth filtering of S-curve; Dynamic mean filtering | |||
| Torque control | Instruction smoothing method: low-pass smoothing filtering; Smooth filtering of S-curve; Dynamic mean filtering Speed limit: parameter setting method or analog input |
|||
| Mixed mode control | Supports switching between position, speed, and torque modes | |||
| contact method | ||||
| CAN、RS485、UART | ||||
| function | ||||
| Anti reverse protection | Provide | Overcurrent protection | Provide | |
| Undervoltage protection | Provide | Overload protection | Provide | |
| Overvoltage protection | Provide | Security isolation protection | Provide | |
| Output short circuit protection | Provide | Temperature monitoring | Provide | |
| Warning light protection | Provided | |||
| I/O | ||||
| Digital input | 6-way optocoupler isolated input | |||
| Digital output | 6-way optocoupler isolated output | |||
| Encoder output interface | Encoder isolated single ended output | |||
| communication interface | CAN bus control, using CAN, RS485, UART for parameter reading, modification, backup, and simple control | |||
![]()
![]()
![]()
![]()
![]()
BX-01 MINI Robot Wire Control Chassis
BX-02 MINI Robot Wire Controlled Chassis
BX-03 Multi floor Motion Robot Wire Controlled Chassis
BX-03X Multi floor Motion Robot Wire Controlled Chassis
BX-05 Multi floor Motion Robot Wire Controlled Chassis
BX-05X Multi floor Motion Robot Wire Controlled Chassis
BX-06 four-wheel eight wheel drive all steering robot wire controlled chassis
BX-08 four-wheel eight wheel drive all steering robot wire controlled chassis
CX-01 Modular Robot Intelligent Driving System
CX-02 Intensive Robot Intelligent Driving System
DX-01 High Density Power Supply System
DX-02 High Density Power Supply System
DX-03 high-precision servo drive
AX-01 Multimodal Large Model Machine Learning Platform
AX-02 Large Language Model and Natural Language Processing
AX-03 Intelligent Dialogue Robot
AX-05 Intelligent Navigation Engine
![]() 0731-85311818
0731-85311818
![]() 0731-85311818
0731-85311818
![]() bot@botxfoundry.com
bot@botxfoundry.com
![]() 410000
410000
![]() 湖南省长沙市雨花区国际创新城9栋504
湖南省长沙市雨花区国际创新城9栋504
Hunan Lingniu Robot Technology . All rights reserved