0731-85311818
中文
|
English
0731-85311818
Cross floor operation, ultra long endurance, equipped with high-performance robot intelligent driving system, supporting multi-mode fusion positioning and navigation

Classic model, elegant and atmospheric, using two wheel drive+four universal wheel sets, a total of ten wheels, and equipped with an independent suspension system design, Excellent ability to independently ride elevators, cross floors, and cross scene operations
Based on classic structural design, using high-strength carbon steel material, the body is sturdy and has outstanding load-bearing capacity. Based on excellent ground clearance and independent suspension structure design, equipped with powerful wheel hub servo motors, the climbing ability can reach 10 °, and the obstacle height can reach 20mm, possessing excellent obstacle climbing ability and meeting the needs of various indoor scenes
Embedded with multiple high-performance automotive grade IMUs, including 2 accelerometers, 3 gyroscopes, 2 barometers, 1 magnetometer, and 1 thermometer
The fault tolerance capability has significantly improved. Compared with traditional consumer grade sensors, the resolution of gyroscopes has increased by 8 times, and the resolution of accelerometers has increased by 4 times
Can provide hyper converged perception capabilities for intelligent robot positioning, navigation, flexible obstacle avoidance, and motion control
The entire series comes standard with 2 binocular vision depth cameras, 1 long-range laser radar, 1 ultrasonic radar, 3 sets of vehicle grade IMUs, and is equipped with high-precision wheel odometry, which can effectively support laser, vision IMU、 Multi sensor fusion such as wheel odometer for SLAM mapping and high-precision positioning navigation
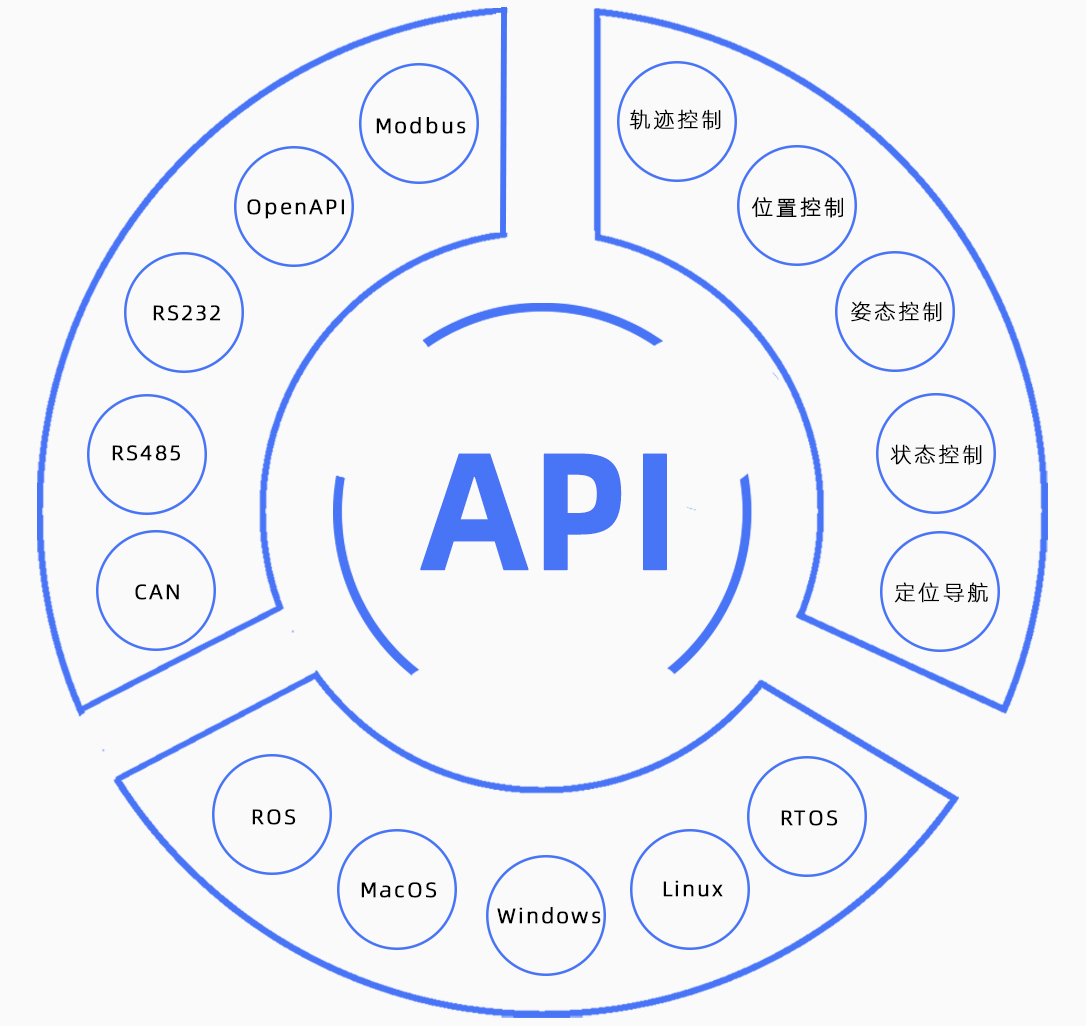
Embedded flight control level real-time operating system, responding in real-time, controlling in real-time, and controlling in real-time. Supports concurrent execution of multiple tasks, and tasks are completely preemptible, with powerful real-time processing capabilities and task management functions. The system architecture adopts modular design, supports POSIX standardized interface protocol, and supports international open source community resources for rapid secondary development

Equipped with a high-performance robot intelligent controller, an integrated intelligent control platform intelligent center is built to effectively enhance the robot's perception, cognition, decision-making, and prediction abilities in complex environments, achieving high-level robot embodied intelligence. Based on the cloud edge collaborative architecture, multi domain collaborative control and distributed cluster operations can be achieved through a trusted wireless communication network

The body is reserved with 1 HDMI, 1 TYPE-C, 1 USB 3.0, 1 USB 2.0, 2 CAT6, and 2 power interfaces. The device interfaces are highly integrated, comprehensively enhancing the expandability of the platform's electrical communication capabilities

Built in USB 3.0 and gigabit switch are two major data exchange shared networks, greatly expanding the connection scale of the device body, achieving low latency, ultra high speed, multi-channel, and reliable high-speed data exchange, facilitating collaborative linkage of various subsystems and efficient connection between devices

Support vehicle grade CAN bus communication protocol, support ROS environment development, can quickly achieve secondary development of the platform, and improve the reusability of the platform
Equipped with a 24V 30Ah high-density battery, it has a long-lasting battery life and can self recharge at low battery levels. It also has built-in battery overcharge protection and low-temperature environment charging self heating function, providing strong and safe power support for robot operation

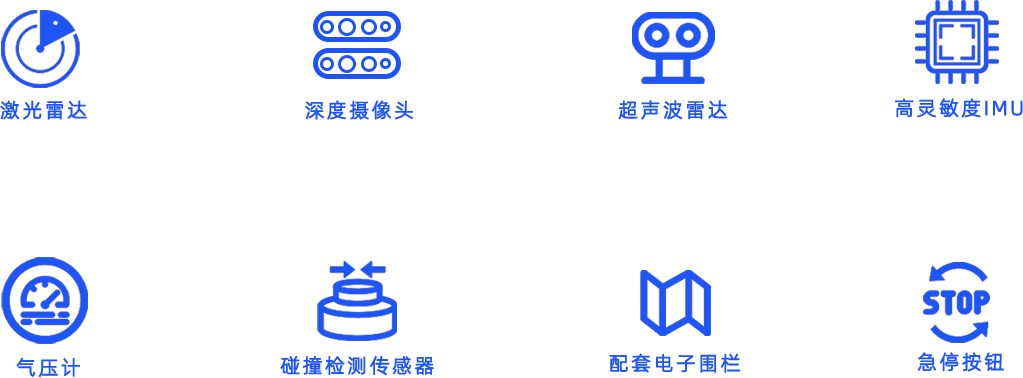
Multi level robot operation safety protection system, based on the fusion perception capabilities of laser radar, depth camera, high-sensitivity IMU, barometer, collision detection sensor, etc., matched with electronic fence and emergency stop button, provides an intelligent and multi-level safety protection system for the safe and stable operation of robots
| Basic Parameters | |||
|---|---|---|---|
| Product Name | BX-05X Multi floor motion robot wire controlled chassis | Product Dimensions(WxDxH) | 480x480x254mm |
| chassis weight | 45kg | Operating Temperature | -20-40℃ |
| structural form | Two wheel differential | Operating Humidity | 20%-80% |
| ground clearance | 38mm | Protection level | IP42 |
| Maximum load | 80kg | Shell color | White (color customizable) |
| Motor and motion capability | |||
| Drive wheel | 2 6.5-inch wheel hub motors | driven wheel | 4 sets of 3.0-inch universal wheels (each wheel set adopts bidirectional differential design and two-stage shock absorption technology, which can achieve 360 ° free rotation of flat bearings) |
| Maximum operating speed | 1.5m/s | Crossing width | 40mm |
| Maximum climbing angle | 10° | Maximum obstacle crossing height | 20mm |
| Sensor parameters | |||
| Laser radar |
Quantity: 1 Distance measurement principle: TOF (Time of Flight) Detection distance: 50m (80% reflectivity) Distance measurement accuracy: full range ± 20mm |
||
| Binocular vision depth camera |
Quantity: 2 Depth accuracy (plane accuracy):< 2mm@1000mm Depth image FOV: H73.8 °× V58.8 °× D86.4 ° RGB image FOV: H80.9 °× V51.7 °× D88.9 ° |
||
| Physical collision avoidance sensor |
Quantity: 2 Trigger distance: 1-2mm Trigger force value: 5-15N |
||
| ultrasonic radar | 1 | Anti fall sensor | 4 |
| Power supply and battery life | |||
| battery | 24V 30Ah | Standby running time | 48h |
| Charging time | 4-5h | Idle running time | 10h |
| Autonomous recharge | support | Manual charging | support |
| Intelligent driving device | |||
| main processor | STM32H753IIK6(32-bit Arm® Cortex®-M7 480MHz MCUs, 2MB Flash, 1MB RAM,16 bit ADC, 12 bit DAC,1.62V-6V, 140 GPIO) |
coprocessor | STM32F103C8T6(32-bit Arm® Cortex®-M3 72MHz MCUs, 64KB Flash,20KB SRAM,2V-3.6V,12 bit ADC,37 GPIO) |
| magnetometer | 1(Bosch chips) | barometer | 2 (Bosch chips) |
| accelerometer | 2(Bosch chips) | Thermometer | 1 |
| Gyroscope | 3(Bosch chips) | ||
| extended interface | |||
| USB3.0 | 1xUSB3.0 | USB2.0 | 1xUSB2.0 |
| CAT6 | 1xCAT6(1000Mbps) | CAT6 | 1xCAN/RS485 | TYPE-C | 1xTYPE-C | HDMI | 1xHDMI |
| DC OUT | 1x12V 12A 1x24V 15A |
||
![]()
![]()
![]()
![]()
![]()
BX-01 MINI Robot Wire Control Chassis
BX-02 MINI Robot Wire Controlled Chassis
BX-03 Multi floor Motion Robot Wire Controlled Chassis
BX-03X Multi floor Motion Robot Wire Controlled Chassis
BX-05 Multi floor Motion Robot Wire Controlled Chassis
BX-05X Multi floor Motion Robot Wire Controlled Chassis
BX-06 four-wheel eight wheel drive all steering robot wire controlled chassis
BX-08 four-wheel eight wheel drive all steering robot wire controlled chassis
CX-01 Modular Robot Intelligent Driving System
CX-02 Intensive Robot Intelligent Driving System
DX-01 High Density Power Supply System
DX-02 High Density Power Supply System
DX-03 high-precision servo drive
AX-01 Multimodal Large Model Machine Learning Platform
AX-02 Large Language Model and Natural Language Processing
AX-03 Intelligent Dialogue Robot
AX-05 Intelligent Navigation Engine
![]() 0731-85311818
0731-85311818
![]() 0731-85311818
0731-85311818
![]() bot@botxfoundry.com
bot@botxfoundry.com
![]() 410000
410000
![]() 湖南省长沙市雨花区国际创新城9栋504
湖南省长沙市雨花区国际创新城9栋504
Hunan Lingniu Robot Technology . All rights reserved