0731-85311818
中文
|
English
0731-85311818
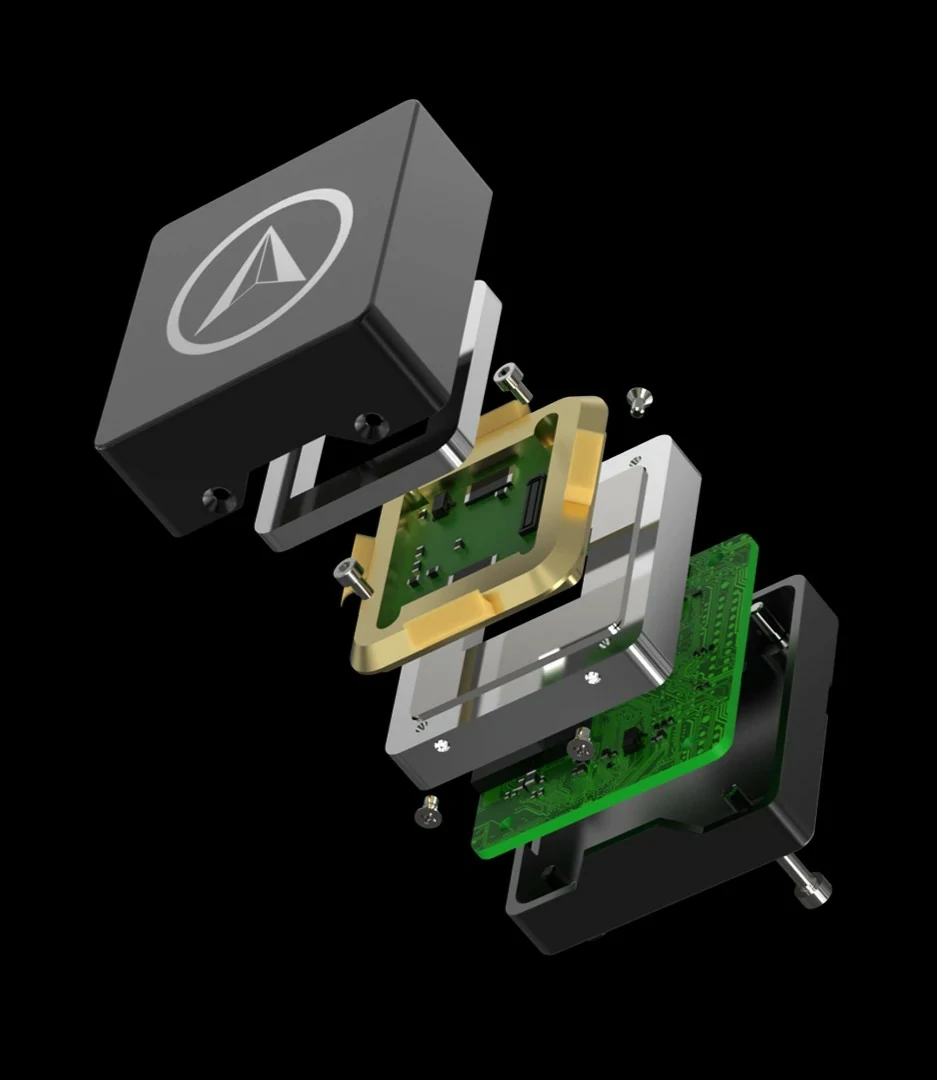
Modular and pluggable Integrated land, sea, and air coverage across the entire region、 High performance dual precision floating-point unit processor Embedded flight control level real-time operating system、Multi sensor fusion at the vehicle specification level、Multiple redundancy guarantee design

Based on the highly integrated design characteristics of technology and structure, a controller can achieve comprehensive applications in water, land, and air, and can handle various scenarios with ease, comprehensively improving the reusability of the controller

Adopting STM32H753 processor with dual precision floating-point unit and ARM Cortex-M7 core, it adds powerful computing power to robots and drones
Operating frequency up to 480MHz, Flash capacity of 2MB, RAM capacity of 1MB
Can synchronously support applications such as motion control, SLAM mapping, high-precision positioning and navigation
Embedded flight control level real-time operating system, responding in real-time, controlling in real-time, and controlling in real-time. Supports concurrent execution of multiple tasks, and tasks are completely preemptible, with powerful real-time processing capabilities and task management functions. The system architecture adopts modular design, supports POSIX standardized interface protocol, and supports international open source community resources for rapid secondary development

Embedded with multiple high-performance automotive grade IMUs, including 2 accelerometers, 3 gyroscopes, 2 barometers, 1 magnetometer, and 1 thermometer
The fault tolerance capability has significantly improved. Compared with traditional consumer grade sensors, the resolution of gyroscopes has increased by 8 times, and the resolution of accelerometers has increased by 4 times
Can provide hyper converged perception capabilities for intelligent robot positioning, navigation, flexible obstacle avoidance, and motion control
Power supply achieves three independent power supplies, enhancing the availability and reliability of the system
Implementing combination redundancy of automotive grade sensor chips to enhance system stability and safety
Communication interfaces achieve multi protocol and multi-channel redundancy, providing more stable and reliable data exchange capabilities

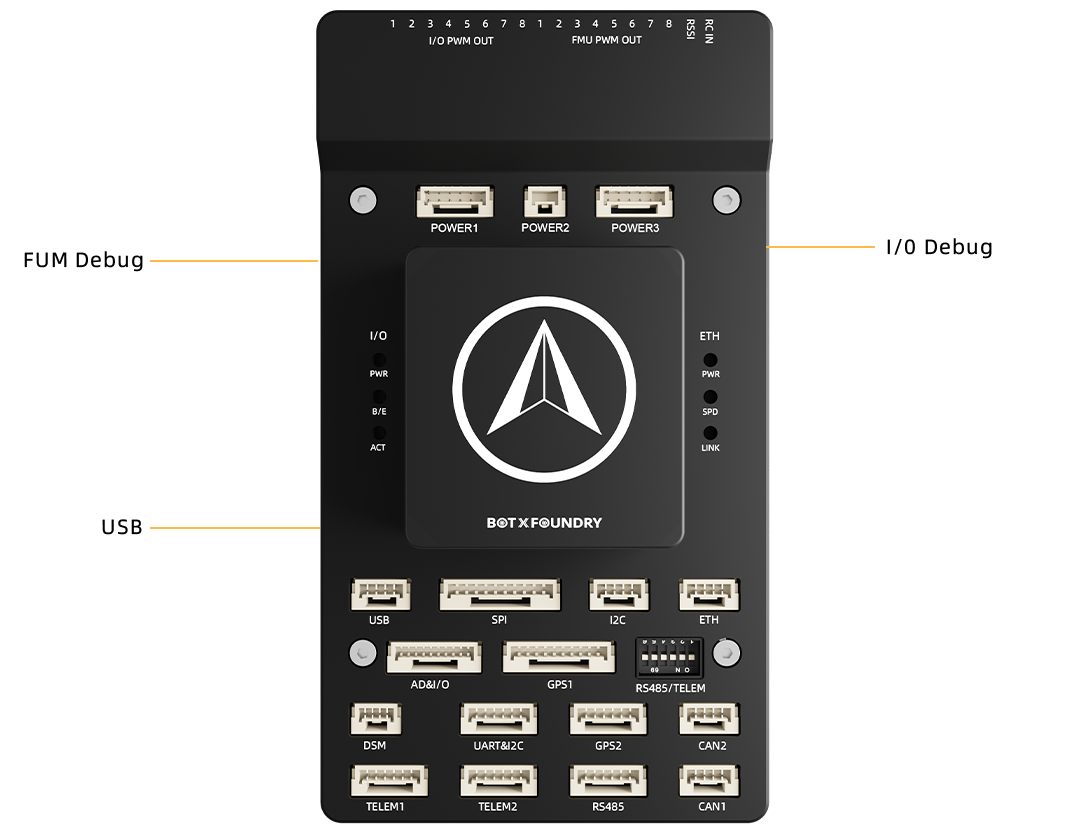
Built in 15 communication control interfaces including RS485, GPIO, UART, I2C, CAN, SPI, TEL, USB, RS232, and 2 debugging interfaces, seamlessly supporting various communication protocols such as CAN, Modbus, SBUS, PPM/PWM, enhancing system compatibility and richness, achieving reliable communication and data exchange, and flexibly meeting users' various needs
Internally integrating various methods such as shock-absorbing materials and shock-absorbing structure design, effectively filtering out noise interference caused by external impacts and vibrations in multiple directions, ensuring the accuracy of sensor data at all times, and safeguarding the application of unmanned driving intelligent agents in multiple scenarios
| Basic Parameters | |||
|---|---|---|---|
| Product Name | CX-01 Modular Robot Intelligent Driving System | Product Dimensions(WxDxH) | 114x64x29mm |
| Operating Temperature | -40-85℃ | ||
| Processor parameters | |||
| main processor | STM32H753IIK6(32-bit Arm® Cortex®-M7 480MHz MCUs, 2MB Flash,1MB RAM,16 bit ADC,12 bit DAC,1.62V-6V, 140GPIO) | ||
| coprocessor | STM32F103C8T6(32-bit Arm® Cortex®-M3 72MHz MCUs, 64KB Flash,20KB SRAM,2V-3.6V, 12 bit ADC,37GPIO) | ||
| Sensor parameters | |||
| accelerometer | 2(Bosch chips) | magnetometer | 1(Bosch chips) |
| Gyroscope | 3(Bosch chips) | barometer | 2(Bosch chips) |
| Thermometer | 1 | ||
| power supply | |||
| DC IN | 2x5V 1x24V |
||
| device interface | |||
| TYPE-C | 1 | SPI | 1 |
| TELEM | 2 | UART&I2C | 1 |
| RS485 | 1 | USB | 1 |
| CAN | 2 | GPS | 2 |
| DSM | 1 | SD card | 1 |
| AD&IO | 1 | FMU DEBUG | 1 |
| ETH | 1 | I/O DEBUG | 1 |
| I2C | 1 | ||
| Needle setting interface | |||
| 5V power interface | PWM output interface | Remote control signal reception | Programmable GPIO |
![]()
![]()
![]()
![]()
![]()
BX-01 MINI Robot Wire Control Chassis
BX-02 MINI Robot Wire Controlled Chassis
BX-03 Multi floor Motion Robot Wire Controlled Chassis
BX-03X Multi floor Motion Robot Wire Controlled Chassis
BX-05 Multi floor Motion Robot Wire Controlled Chassis
BX-05X Multi floor Motion Robot Wire Controlled Chassis
BX-06 four-wheel eight wheel drive all steering robot wire controlled chassis
BX-08 four-wheel eight wheel drive all steering robot wire controlled chassis
CX-01 Modular Robot Intelligent Driving System
CX-02 Intensive Robot Intelligent Driving System
DX-01 High Density Power Supply System
DX-02 High Density Power Supply System
DX-03 high-precision servo drive
AX-01 Multimodal Large Model Machine Learning Platform
AX-02 Large Language Model and Natural Language Processing
AX-03 Intelligent Dialogue Robot
AX-05 Intelligent Navigation Engine
![]() 0731-85311818
0731-85311818
![]() 0731-85311818
0731-85311818
![]() bot@botxfoundry.com
bot@botxfoundry.com
![]() 410000
410000
![]() 湖南省长沙市雨花区国际创新城9栋504
湖南省长沙市雨花区国际创新城9栋504
Hunan Lingniu Robot Technology . All rights reserved